{kind=link}
TerrainFloodSense: Improving Seamless Flood Mapping with Cloudy Satellite Imagery via Water Occurrence and Terrain Data Fusion
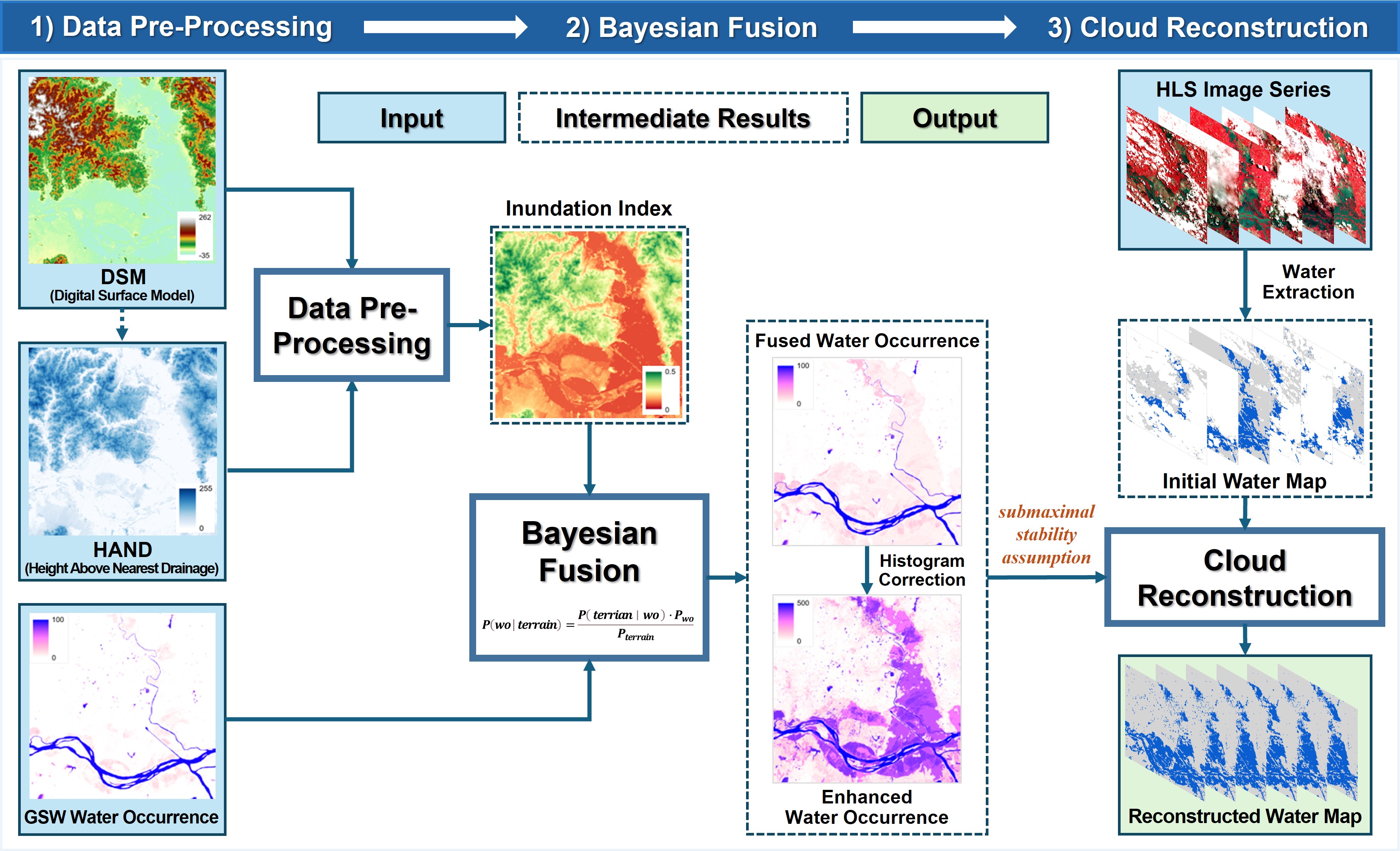
Accurate monitoring of inundation extents during floods is crucial for disaster management and impact assessment. While remote sensing can provide strong support for flood monitoring, optical satellite images often face significant challenges due to weather conditions and infrequent revisits, particularly in cloudy and rainy regions. To address this limitation and achieve seamless flood mapping with cloudy satellite images, we propose TerrainFloodSense, a novel method that fuses water occurrence with terrain data to enhance the reconstruction of cloud-covered flooding areas, especially under extreme and unprecedented flood scenarios.
📝Publication:
Zhiwei Li, Shaofen Xu, and Qihao Weng. TerrainFloodSense: Improving seamless flood mapping with cloudy satellite imagery via water occurrence and terrain data fusion. International Journal of Applied Earth Observations and Geoinformation, vol. 144, pp. 104855, 2025. [PDF]
💻Code:
_BayesOccEnhencement_Main.py
Water Occurrence: https://global-surface-water.appspot.com/download
DSM: https://developers.google.com/earth-engine/datasets/catalog/JAXA_ALOS_AW3D30_V2_2
HAND: https://gee-community-catalog.org/projects/hand/#resolutions
Note: Make sure all data are in a uniform data range, projection, and resolution.
Water_Occur_path: Path to the Water Occurrence data;
HAND_Path: Path to the HAND data;
DEM_Path: Path to the DEM data;
wt: The weight ratio of HAND, the weight ratio of DEM is (1-wt), with the sum of the two weights being 1;
thr: Threshold for modifying Water Occurrence values; Water Occurrence values below this threshold will be modified;
classes: Classes for resampling the histogram of the original Water Occurrence when performing histogram matching;
Occ_Bayes: Whether to save the Water Occurrence calculated using the Bayesian method based on geographic data. If set to None, it will not be saved; if set to a path, it will be saved;
Occ_Bayes_Matching: Path to save the enhanced Water Occurrence, which integrates the Water Occurrence calculated based on geographic data with histogram matching applied to the original Water Occurrence.
_Flood_Mapping_HLS_Main.py
Preparation of initial multiple single-band data or single multi-band data is consistent with “Beyond clouds: Seamless flood mapping using Harmonized Landsat and Sentinel-2 time series imagery and water occurrence data”.https://github.com/dr-lizhiwei/SeamlessFloodMapper
DataPath: Folder for storing processed data and result files;
Bands_Folder: Folder containing multiple single-band data;
Bandfusion: Whether multi-band fusion is needed for single-band data;
RenderHLS: Whether pseudo-color visualization is needed for multi-band data;
Fmask2Cloud: Whether cloud mask data needs to be binary decoded;
config: Path to the model parameter settings file for the large flood semantic segmentation model;
ckpt: Model weights for the large flood semantic segmentation model;
bands: Bands used by the semantic segmentation model;
SemanticSegment: Path to save semantic segmentation results;
Water_Occur_path: Path to save enhanced Water Occurrence;
CloudRemoval: Whether cloud removal operation is needed;
InitialWaterMaps: Whether to visualize Initial Water Maps;
WaterReconstruction: Method for reconstructing water maps using global or local thresholds;
ReconstructedWaterMaps: Whether to visualize Reconstructed Water Maps.