Program is written in SDL2.0 C++
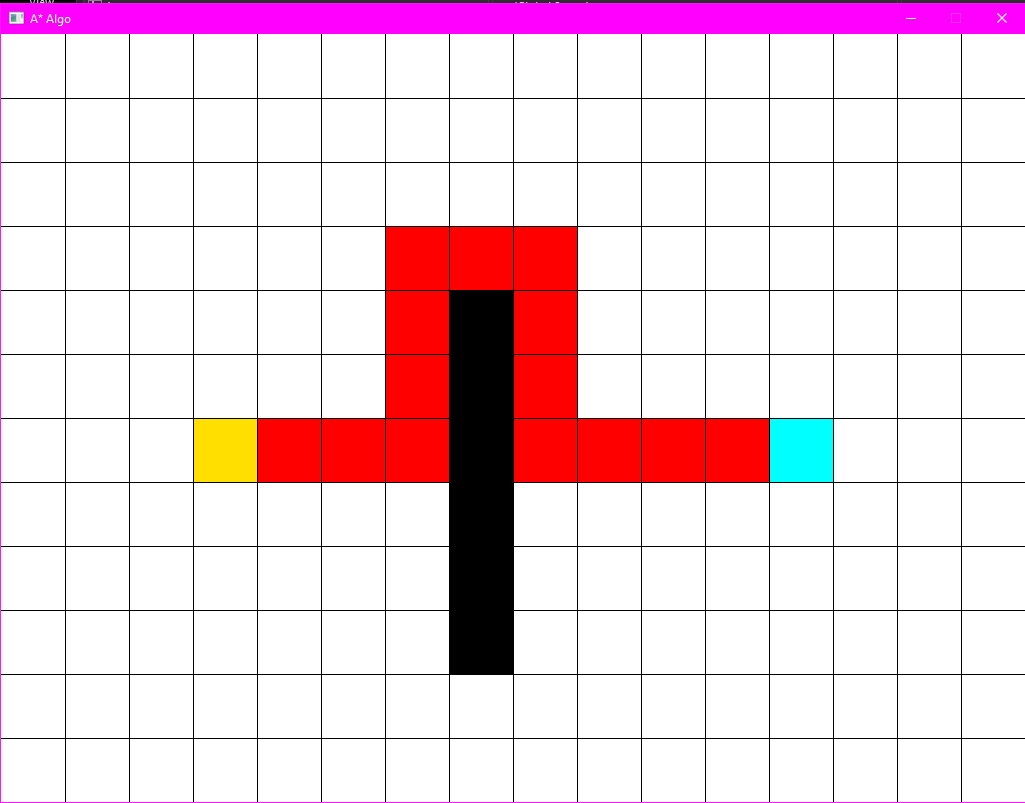
Program uses A-star path-finding algorithm to search from Point A to Point B as shown as a Yellow box and Blue box
Black Box represents walls or blocked pathways.
Controls
LMB: Select grid
RMB: Unselect grid
E: Switch Grid choice (Point A -> Point B -> Wall)
Enter: Run
Project is not fully complete and will be refined later
Additional path-finding algorithms will be added in the future